ಎಂಪಿಯು -6050 ನೊಂದಿಗೆ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಉತ್ತಮಗೊಳಿಸುವುದು: ಸೆಟಪ್, ಮಾಪನಾಂಕ ನಿರ್ಣಯ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ಗಳು
2024-04-25
9268
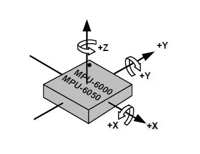
ಎಂಪಿಯು -6050 ಇದು ವಿಶ್ವದ ಮೊದಲ ಸಂಯೋಜಿತ 6-ಆಕ್ಸಿಸ್ ಚಲನೆಯ ಸಂಸ್ಕರಣಾ ಘಟಕವಾಗಿದೆ, ಇದು 3-ಅಕ್ಷದ ಗೈರೊಸ್ಕೋಪ್, 3-ಆಕ್ಸಿಸ್ ಆಕ್ಸಿಲರೊಮೀಟರ್ ಮತ್ತು ಸ್ಕೇಲೆಬಲ್ ಡಿಜಿಟಲ್ ಮೋಷನ್ ಪ್ರೊಸೆಸರ್ (ಡಿಎಂಪಿ) ಅನ್ನು ಸಂಯೋಜಿಸುತ್ತದೆ.ಇದನ್ನು ಬಳಸುವ ಉದ್ದೇಶವು ಎಕ್ಸ್, ವೈ ಮತ್ತು ಅಕ್ಷಗಳಲ್ಲಿ ಅಳೆಯಬೇಕಾದ ವಸ್ತುವಿನ ಇಳಿಜಾರಿನ ಕೋನವನ್ನು (ಕ್ವಾಡ್ಕಾಪ್ಟರ್, ಬ್ಯಾಲೆನ್ಸಿಂಗ್ ಕಾರ್ ನಂತಹ) ಪಡೆಯುವುದು, ಅಂದರೆ ಪಿಚ್ ಕೋನ, ರೋಲ್ ಕೋನ ಮತ್ತು ಯಾವ್ ಕೋನ.ಐ 2 ಸಿ ಇಂಟರ್ಫೇಸ್ ಮೂಲಕ ಎಂಪಿಯು -6050 (ಮೂರು-ಅಕ್ಷದ ವೇಗವರ್ಧನೆ ಜಾಹೀರಾತು ಮೌಲ್ಯ ಮತ್ತು ಮೂರು-ಅಕ್ಷದ ಕೋನೀಯ ವೇಗದ ಜಾಹೀರಾತು ಮೌಲ್ಯ) ನ ಆರು ಡೇಟಾವನ್ನು ನಾವು ಓದುತ್ತೇವೆ.ಭಂಗಿ ಸಮ್ಮಿಳನ ಸಂಸ್ಕರಣೆಯ ನಂತರ, ಪಿಚ್, ರೋಲ್ ಮತ್ತು ಯಾವ್ ಕೋನಗಳನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು.ಮಾಪನ ಮೌಲ್ಯಗಳಿಗೆ ದಿಕ್ಕಿನ ಉಲ್ಲೇಖವಾಗಿ, ಸಂವೇದಕ ನಿರ್ದೇಶಾಂಕ ದಿಕ್ಕಿನ ವ್ಯಾಖ್ಯಾನವು ಕೆಳಗಿನ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ, ಇದು ಬಲಗೈ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯ ತತ್ವವನ್ನು ಅನುಸರಿಸುತ್ತದೆ (ಅಂದರೆ, ಬಲ ಹೆಬ್ಬೆರಳು x- ನ ಸಕಾರಾತ್ಮಕ ದಿಕ್ಕಿಗೆ ಬರುತ್ತದೆಅಕ್ಷ, ಸೂಚ್ಯಂಕದ ಬೆರಳು ವೈ-ಅಕ್ಷದ ಸಕಾರಾತ್ಮಕ ದಿಕ್ಕನ್ನು ಸೂಚಿಸುತ್ತದೆ, ಮತ್ತು ಮಧ್ಯದ ಬೆರಳು -ಡ್-ಅಕ್ಷದ ಸಕಾರಾತ್ಮಕ ದಿಕ್ಕನ್ನು ಸೂಚಿಸುತ್ತದೆ).
ಪಟ್ಟಿ
ಅದರ ಮೀಸಲಾದ ಐ 2 ಸಿ ಸಂವೇದಕ ಬಸ್ನೊಂದಿಗೆ, ಎಂಪಿಯು -6050 ಬಾಹ್ಯ 3-ಅಕ್ಷದ ದಿಕ್ಸೂಚಿಯಿಂದ ನೇರವಾಗಿ ಇನ್ಪುಟ್ ಸ್ವೀಕರಿಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ, ಇದು ಪೂರ್ಣ 9-ಆಕ್ಸಿಸ್ ಮೋಷನ್ಫ್ಯೂಷನ್ ™ .ಟ್ಪುಟ್ ಅನ್ನು ಒದಗಿಸುತ್ತದೆ.ಇದು ಸಂಯೋಜಿತ ಗೈರೊಸ್ಕೋಪ್ ಮತ್ತು ವೇಗವರ್ಧಕ ಟೈಮ್ಲೈನ್ ನಡುವಿನ ವ್ಯತ್ಯಾಸದ ಸಮಸ್ಯೆಯನ್ನು ನಿವಾರಿಸುತ್ತದೆ ಮತ್ತು ಬಹು-ಘಟಕ ಪರಿಹಾರಗಳಿಗೆ ಹೋಲಿಸಿದರೆ ಪ್ಯಾಕೇಜಿಂಗ್ ಸ್ಥಳವನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.ಮೂರು-ಅಕ್ಷದ ಮ್ಯಾಗ್ನೆಟೋಮೀಟರ್ಗೆ ಸಂಪರ್ಕಿಸಿದಾಗ, ಎಂಪಿಯು -60x0 ತನ್ನ ಮುಖ್ಯ ಐ 2 ಸಿ ಅಥವಾ ಎಸ್ಪಿಐ ಬಂದರಿಗೆ ಪೂರ್ಣ 9-ಆಕ್ಸಿಸ್ ಮೋಷನ್ ಫ್ಯೂಷನ್ output ಟ್ಪುಟ್ ಅನ್ನು ಒದಗಿಸುವ ಸಾಮರ್ಥ್ಯ ಹೊಂದಿದೆ (ಎಸ್ಪಿಐ ಪೋರ್ಟ್ ಎಂಪಿಯು -6000 ನಲ್ಲಿ ಮಾತ್ರ ಲಭ್ಯವಿದೆ ಎಂಬುದನ್ನು ಗಮನಿಸಿ).
ಪರ್ಯಾಯಗಳು ಮತ್ತು ಸಮಾನತೆಗಳು
ಎಂಪಿಯು -6050 ತಯಾರಕರು
ಎಂಪಿಯು -6050 ತಯಾರಕರು ಟಿಡಿಕೆ.ಟೋಕಿಯೊದಲ್ಲಿ ಫೆರೈಟ್ ಅನ್ನು ಟಿಡಿಕೆ ಇಬ್ಬರು ಸಂಸ್ಥಾಪಕರಾದ ಡಾ. ಯೋಗೊರೊ ಕ್ಯಾಟೊ ಮತ್ತು ಟೇಕಿ ಟೇಕಿ ಕಂಡುಹಿಡಿದ ನಂತರ, ಅವರು ಟೋಕಿಯೊ ಡೆಂಕಿಕಾಗಾಕು1935 ರಲ್ಲಿ. ಜಾಗತಿಕ ಎಲೆಕ್ಟ್ರಾನಿಕ್ಸ್ ಉದ್ಯಮದ ಬ್ರಾಂಡ್ ಆಗಿ, ಟಿಡಿಕೆ ಯಾವಾಗಲೂ ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಕಚ್ಚಾ ವಸ್ತುಗಳು ಮತ್ತು ಎಲೆಕ್ಟ್ರಾನಿಕ್ ಘಟಕಗಳ ಕ್ಷೇತ್ರಗಳಲ್ಲಿ ಪ್ರಬಲ ಸ್ಥಾನವನ್ನು ಉಳಿಸಿಕೊಂಡಿದೆ.ಟಿಡಿಕೆ ಯ ಸಮಗ್ರ ಮತ್ತು ನಾವೀನ್ಯತೆ-ಚಾಲಿತ ಉತ್ಪನ್ನ ಪೋರ್ಟ್ಫೋಲಿಯೊ ಸೆರಾಮಿಕ್ ಕೆಪಾಸಿಟರ್ಗಳು, ಅಲ್ಯೂಮಿನಿಯಂ ವಿದ್ಯುದ್ವಿಚ್ ly ೇದ್ಯ ಕೆಪಾಸಿಟರ್ಗಳು, ಫಿಲ್ಮ್ ಕೆಪಾಸಿಟರ್ಗಳು, ಮ್ಯಾಗ್ನೆಟಿಕ್ ಉತ್ಪನ್ನಗಳು, ಅಧಿಕ-ಆವರ್ತನ ಘಟಕಗಳು, ಪೀಜೋಎಲೆಕ್ಟ್ರಿಕ್ ಮತ್ತು ರಕ್ಷಣೆ ಸಾಧನಗಳು, ಮತ್ತು ಸಂವೇದಕಗಳು ಮತ್ತು ಸಂವೇದಕಗಳು ಮತ್ತು ಸಂವೇದಕಗಳನ್ನು (ತಾಪಮಾನ ಮತ್ತು ಒತ್ತಡ, ನಂತಹ ತಾಪಮಾನ ಮತ್ತು ಸಂವೇದಕ ವ್ಯವಸ್ಥೆಗಳು (ತಾಪಮಾನ ಮತ್ತು ಒತ್ತಡ, ನಂತಹ ತಾಪಮಾನ ಮತ್ತು ಸಂವೇದಕ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಒಳಗೊಂಡಿದೆ.ಮ್ಯಾಗ್ನೆಟಿಕ್ ಮತ್ತು ಎಂಇಎಂಎಸ್ ಸಂವೇದಕಗಳು), ಇತ್ಯಾದಿ. ಜೊತೆಗೆ, ಟಿಡಿಕೆ ವಿದ್ಯುತ್ ಸರಬರಾಜು ಮತ್ತು ಇಂಧನ ಸಾಧನಗಳು, ಮ್ಯಾಗ್ನೆಟಿಕ್ ಹೆಡ್ಸ್ ಮತ್ತು ಇತರ ಉತ್ಪನ್ನಗಳನ್ನು ಸಹ ಒದಗಿಸುತ್ತದೆ.ಇದರ ಉತ್ಪನ್ನ ಬ್ರಾಂಡ್ಗಳಲ್ಲಿ ಟಿಡಿಕೆ, ಇಪಿಸಿಒಎಸ್, ಇನ್ವೆನ್ಸೆನ್ಸ್, ಮೈಕ್ರೋನಾಸ್, ಟ್ರೋನಿಕ್ಸ್ ಮತ್ತು ಟಿಡಿಕೆ-ಲ್ಯಾಂಬ್ಡಾ ಸೇರಿವೆ.
ಎಂಪಿಯು -6050 ರ ಆಂತರಿಕ ಬ್ಲಾಕ್ ರೇಖಾಚಿತ್ರ

ಅವುಗಳಲ್ಲಿ, ಎಸ್ಸಿಎಲ್ ಮತ್ತು ಎಸ್ಡಿಎಗಳು ಎಂಸಿಯುಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ ಐಐಸಿ ಇಂಟರ್ಫೇಸ್ಗಳಿವೆ, ಮತ್ತು ಎಂಸಿಯು ಈ ಐಐಸಿ ಇಂಟರ್ಫೇಸ್ ಮೂಲಕ ಎಂಪಿಯು -6050 ಅನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ.ಐಐಸಿ ಇಂಟರ್ಫೇಸ್ ಸಹ ಇದೆ, ಅವುಗಳೆಂದರೆ AUX_CL ಮತ್ತು AUX_DA.ಒಂಬತ್ತು-ಅಕ್ಷದ ಸಂವೇದಕವನ್ನು ರೂಪಿಸಲು ಮ್ಯಾಗ್ನೆಟಿಕ್ ಸೆನ್ಸರ್ಗಳಂತಹ ಬಾಹ್ಯ ಗುಲಾಮ ಸಾಧನಗಳನ್ನು ಸಂಪರ್ಕಿಸಲು ಈ ಇಂಟರ್ಫೇಸ್ ಅನ್ನು ಬಳಸಬಹುದು.ವ್ಲಾಜಿಕ್ ಐಒ ಪೋರ್ಟ್ ವೋಲ್ಟೇಜ್ ಆಗಿದೆ.ಈ ಪಿನ್ ಕನಿಷ್ಠ 1.8 ವಿ ಅನ್ನು ಬೆಂಬಲಿಸುತ್ತದೆ.ನಾವು ಸಾಮಾನ್ಯವಾಗಿ ಅದನ್ನು ನೇರವಾಗಿ ವಿಡಿಡಿಗೆ ಸಂಪರ್ಕಿಸುತ್ತೇವೆ.ಎಡಿ 0 ಎನ್ನುವುದು ಸ್ಲೇವ್ ಐಐಸಿ ಇಂಟರ್ಫೇಸ್ನ ವಿಳಾಸ ನಿಯಂತ್ರಣ ಪಿನ್ ಆಗಿದೆ (ಎಂಸಿಯುಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ).ಈ ಪಿನ್ ಐಐಸಿ ವಿಳಾಸದ ಕಡಿಮೆ ಬಿಟ್ ಅನ್ನು ನಿಯಂತ್ರಿಸುತ್ತದೆ.ಇದು ಜಿಎನ್ಡಿಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ್ದರೆ, ಎಂಪಿಯು -6050 ರ ಐಐಸಿ ವಿಳಾಸ 0x68 ಆಗಿದೆ;ಇದು ವಿಡಿಡಿಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ್ದರೆ, ಅದು 0x69 ಆಗಿದೆ.ಇಲ್ಲಿರುವ ವಿಳಾಸವು ಕಡಿಮೆ ಡೇಟಾ ಪ್ರಸರಣವನ್ನು ಒಳಗೊಂಡಿಲ್ಲ ಎಂಬುದನ್ನು ದಯವಿಟ್ಟು ಗಮನಿಸಿ (ಓದಲು ಮತ್ತು ಬರೆಯುವ ಕಾರ್ಯಾಚರಣೆಗಳನ್ನು ಪ್ರತಿನಿಧಿಸಲು ಕಡಿಮೆ ಬಿಟ್ ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ).MWBALASTSSTC15 ನಲ್ಲಿ, AD0 ಅನ್ನು GND ಗೆ ಸಂಪರ್ಕಿಸಲಾಗಿದೆ, ಆದ್ದರಿಂದ MPU-6050 ನ IIC ವಿಳಾಸ 0x68 (ಕಡಿಮೆ ಬಿಟ್ ಹೊರತುಪಡಿಸಿ).
ಐಐಸಿ ಇಂಟರ್ಫೇಸ್ ಅನ್ನು ಪ್ರಾರಂಭಿಸಿ
ಎಂಪಿಯು -6050 ಎಸ್ಟಿಸಿ 15 ರೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸಲು ಐಐಸಿಯನ್ನು ಬಳಸುತ್ತದೆ, ಆದ್ದರಿಂದ ನಾವು ಮೊದಲು ಎಂಪಿಯು -6050 ಗೆ ಸಂಪರ್ಕ ಹೊಂದಿದ ಎಸ್ಡಿಎ ಮತ್ತು ಎಸ್ಸಿಎಲ್ ಡೇಟಾ ಲೈನ್ಗಳನ್ನು ಪ್ರಾರಂಭಿಸಬೇಕಾಗಿದೆ.
ಎಂಪಿಯು -6050 ಅನ್ನು ಮರುಹೊಂದಿಸಿ
ಈ ಹಂತವು ಎಂಪಿಯು -6050 ರೊಳಗಿನ ಎಲ್ಲಾ ರೆಜಿಸ್ಟರ್ಗಳನ್ನು ಅವುಗಳ ಡೀಫಾಲ್ಟ್ ಮೌಲ್ಯಗಳಿಗೆ ಮರುಸ್ಥಾಪಿಸುತ್ತದೆ, ಇದು ವಿದ್ಯುತ್ ನಿರ್ವಹಣಾ ರಿಜಿಸ್ಟರ್ 1 (0x6b) ನ 1 ರಿಂದ ಬಿಟ್ 7 ಅನ್ನು ಬರೆಯುವ ಮೂಲಕ ಸಾಧಿಸಲಾಗುತ್ತದೆ.ಮರುಹೊಂದಿಸಿದ ನಂತರ, ವಿದ್ಯುತ್ ನಿರ್ವಹಣಾ ರಿಜಿಸ್ಟರ್ 1 ಅನ್ನು ಡೀಫಾಲ್ಟ್ ಮೌಲ್ಯಕ್ಕೆ (0x40) ಮರುಸ್ಥಾಪಿಸಲಾಗುತ್ತದೆ, ಮತ್ತು ಈ ರಿಜಿಸ್ಟರ್ ಅನ್ನು ತರುವಾಯ ಎಂಪಿಯು -6050 ಅನ್ನು ಎಚ್ಚರಗೊಳಿಸಲು 0x00 ಗೆ ಹೊಂದಿಸಬೇಕು ಮತ್ತು ಅದನ್ನು ಸಾಮಾನ್ಯ ಕೆಲಸದ ಸ್ಥಿತಿಗೆ ತರಬೇಕು.
ಕೋನೀಯ ವೇಗ ಸಂವೇದಕ (ಗೈರೊ) ಮತ್ತು ವೇಗವರ್ಧಕ ಸಂವೇದಕದ ಪೂರ್ಣ-ಪ್ರಮಾಣದ ಶ್ರೇಣಿಯನ್ನು ಹೊಂದಿಸಿ
ಈ ಹಂತದಲ್ಲಿ, ನಾವು ಎರಡು ಸಂವೇದಕಗಳ ಪೂರ್ಣ-ಪ್ರಮಾಣದ ಶ್ರೇಣಿಯನ್ನು (ಎಫ್ಎಸ್ಆರ್) ಕ್ರಮವಾಗಿ ಗೈರೊಸ್ಕೋಪ್ ಕಾನ್ಫಿಗರೇಶನ್ ರಿಜಿಸ್ಟರ್ (0x1 ಬಿ) ಮತ್ತು ವೇಗವರ್ಧಕ ಸಂವೇದಕ ಸಂರಚನಾ ರಿಜಿಸ್ಟರ್ (0x1 ಸಿ) ಮೂಲಕ ಹೊಂದಿಸುತ್ತೇವೆ.ವಿಶಿಷ್ಟವಾಗಿ, ನಾವು ಗೈರೊಸ್ಕೋಪ್ನ ಪೂರ್ಣ-ಪ್ರಮಾಣದ ಶ್ರೇಣಿಯನ್ನು ± 2000 ಡಿಪಿಎಸ್ ಮತ್ತು ಅಕ್ಸೆಲೆರೊಮೀಟರ್ನ ಪೂರ್ಣ-ಪ್ರಮಾಣದ ಶ್ರೇಣಿಯನ್ನು ± 2 ಜಿ ಗೆ ಹೊಂದಿಸುತ್ತೇವೆ.
ಇತರ ನಿಯತಾಂಕಗಳನ್ನು ಹೊಂದಿಸಿ
ಇಲ್ಲಿ, ನಾವು ಈ ಕೆಳಗಿನ ನಿಯತಾಂಕಗಳನ್ನು ಸಹ ಕಾನ್ಫಿಗರ್ ಮಾಡಬೇಕಾಗಿದೆ: ಅಡ್ಡಿಪಡಿಸುವಿಕೆಯನ್ನು ಆಫ್ ಮಾಡಿ, AUX I2C ಇಂಟರ್ಫೇಸ್ ಅನ್ನು ನಿಷ್ಕ್ರಿಯಗೊಳಿಸಿ, FIFO ಅನ್ನು ನಿಷ್ಕ್ರಿಯಗೊಳಿಸಿ, ಗೈರೊಸ್ಕೋಪ್ ಮಾದರಿ ದರವನ್ನು ಹೊಂದಿಸಿ ಮತ್ತು ಡಿಜಿಟಲ್ ಲೋ-ಪಾಸ್ ಫಿಲ್ಟರ್ (ಡಿಎಲ್ಪಿಎಫ್) ಅನ್ನು ಕಾನ್ಫಿಗರ್ ಮಾಡಿ.ಈ ಅಧ್ಯಾಯದಲ್ಲಿ ಡೇಟಾವನ್ನು ಓದಲು ನಾವು ಅಡಚಣೆಗಳನ್ನು ಬಳಸದ ಕಾರಣ, ಅಡಚಣೆ ಕಾರ್ಯವನ್ನು ಆಫ್ ಮಾಡಬೇಕಾಗಿದೆ.ಅದೇ ಸಮಯದಲ್ಲಿ, ಇತರ ಬಾಹ್ಯ ಸಂವೇದಕಗಳನ್ನು ಸಂಪರ್ಕಿಸಲು ನಾವು AUX I2C ಇಂಟರ್ಫೇಸ್ ಅನ್ನು ಬಳಸದ ಕಾರಣ, ನಾವು ಈ ಇಂಟರ್ಫೇಸ್ ಅನ್ನು ಸಹ ಮುಚ್ಚಬೇಕಾಗಿದೆ.ಈ ಕಾರ್ಯಗಳನ್ನು ಇಂಟರಪ್ಟ್ ಎನೇಬಲ್ ರಿಜಿಸ್ಟರ್ (0x38) ಮತ್ತು ಬಳಕೆದಾರ ನಿಯಂತ್ರಣ ರಿಜಿಸ್ಟರ್ (0x6a) ಮೂಲಕ ನಿಯಂತ್ರಿಸಬಹುದು.ಎಂಪಿಯು -6050 ಸೆನ್ಸಾರ್ ಡೇಟಾವನ್ನು ಸಂಗ್ರಹಿಸಲು FIFO ಅನ್ನು ಬಳಸಬಹುದು, ಆದರೆ ನಾವು ಇದನ್ನು ಈ ಅಧ್ಯಾಯದಲ್ಲಿ ಬಳಸಿಲ್ಲ, ಆದ್ದರಿಂದ ಎಲ್ಲಾ FIFO ಚಾನಲ್ಗಳನ್ನು ಮುಚ್ಚಬೇಕಾಗಿದೆ.ಇದನ್ನು FIFO ಸಕ್ರಿಯ ರಿಜಿಸ್ಟರ್ (0x23) ಮೂಲಕ ನಿಯಂತ್ರಿಸಬಹುದು.ಪೂರ್ವನಿಯೋಜಿತವಾಗಿ, ಈ ರಿಜಿಸ್ಟರ್ನ ಮೌಲ್ಯವು 0 ಆಗಿದೆ (ಅಂದರೆ, FIFO ಅನ್ನು ನಿಷ್ಕ್ರಿಯಗೊಳಿಸಲಾಗಿದೆ), ಆದ್ದರಿಂದ ನಾವು ಡೀಫಾಲ್ಟ್ ಮೌಲ್ಯವನ್ನು ನೇರವಾಗಿ ಬಳಸಬಹುದು.ಗೈರೊಸ್ಕೋಪ್ನ ಮಾದರಿ ದರವನ್ನು ಮಾದರಿ ದರ ವಿಭಾಜಕ ರಿಜಿಸ್ಟರ್ (0x19) ನಿಂದ ನಿಯಂತ್ರಿಸಲಾಗುತ್ತದೆ.ಸಾಮಾನ್ಯವಾಗಿ, ನಾವು ಈ ಮಾದರಿ ದರವನ್ನು 50 ಕ್ಕೆ ಹೊಂದಿಸಿದ್ದೇವೆ. ಡಿಜಿಟಲ್ ಲೋ-ಪಾಸ್ ಫಿಲ್ಟರ್ (ಡಿಎಲ್ಪಿಎಫ್) ನ ಸಂರಚನೆಯು ಕಾನ್ಫಿಗರೇಶನ್ ರಿಜಿಸ್ಟರ್ (0x1 ಎ) ಮೂಲಕ ಪೂರ್ಣಗೊಂಡಿದೆ.ಸಾಮಾನ್ಯವಾಗಿ ಹೇಳುವುದಾದರೆ, ಡೇಟಾ ನಿಖರತೆ ಮತ್ತು ಪ್ರತಿಕ್ರಿಯೆ ವೇಗವನ್ನು ಸಮತೋಲನಗೊಳಿಸಲು ನಾವು ಡಿಎಲ್ಪಿಎಫ್ ಅನ್ನು ಅರ್ಧದಷ್ಟು ಬ್ಯಾಂಡ್ವಿಡ್ತ್ಗೆ ಹೊಂದಿಸುತ್ತೇವೆ.
ಸಿಸ್ಟಮ್ ಗಡಿಯಾರ ಮೂಲವನ್ನು ಕಾನ್ಫಿಗರ್ ಮಾಡಿ ಮತ್ತು ಕೋನೀಯ ವೇಗ ಸಂವೇದಕ ಮತ್ತು ವೇಗವರ್ಧಕ ಸಂವೇದಕವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಿ
ಸಿಸ್ಟಮ್ ಗಡಿಯಾರ ಮೂಲದ ಸೆಟ್ಟಿಂಗ್ ಪವರ್ ಮ್ಯಾನೇಜ್ಮೆಂಟ್ ರಿಜಿಸ್ಟರ್ 1 (0x6b) ಅನ್ನು ಅವಲಂಬಿಸಿರುತ್ತದೆ, ಅಲ್ಲಿ ಈ ರಿಜಿಸ್ಟರ್ನ ಕಡಿಮೆ ಮೂರು ಬಿಟ್ಗಳು ಗಡಿಯಾರ ಮೂಲದ ಆಯ್ಕೆಯನ್ನು ನಿರ್ಧರಿಸುತ್ತವೆ.ಪೂರ್ವನಿಯೋಜಿತವಾಗಿ, ಈ ಮೂರು ಬಿಟ್ಗಳನ್ನು 0 ಗೆ ಹೊಂದಿಸಲಾಗಿದೆ, ಅಂದರೆ ಸಿಸ್ಟಮ್ ಆಂತರಿಕ 8MHz RC ಆಂದೋಲಕವನ್ನು ಗಡಿಯಾರ ಮೂಲವಾಗಿ ಬಳಸುತ್ತದೆ.ಆದಾಗ್ಯೂ, ಗಡಿಯಾರದ ನಿಖರತೆಯನ್ನು ಸುಧಾರಿಸಲು, ನಾವು ಅದನ್ನು ಆಗಾಗ್ಗೆ 1 ಕ್ಕೆ ಹೊಂದಿಸುತ್ತೇವೆ ಮತ್ತು ಎಕ್ಸ್-ಆಕ್ಸಿಸ್ ಗೈರೊಸ್ಕೋಪ್ ಪಿಎಲ್ಎಲ್ ಅನ್ನು ಗಡಿಯಾರ ಮೂಲವಾಗಿ ಆಯ್ಕೆ ಮಾಡುತ್ತೇವೆ.ಇದರ ಜೊತೆಯಲ್ಲಿ, ಕೋನೀಯ ವೇಗ ಸಂವೇದಕ ಮತ್ತು ವೇಗವರ್ಧಕ ಸಂವೇದಕವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸುವುದು ಪ್ರಾರಂಭಿಕ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಒಂದು ಪ್ರಮುಖ ಹಂತವಾಗಿದೆ.ಎರಡೂ ಕಾರ್ಯಾಚರಣೆಗಳನ್ನು ವಿದ್ಯುತ್ ನಿರ್ವಹಣಾ ರಿಜಿಸ್ಟರ್ 2 (0x6 ಸಿ) ಮೂಲಕ ಕಾರ್ಯಗತಗೊಳಿಸಲಾಗುತ್ತದೆ.ಅನುಗುಣವಾದ ಸಂವೇದಕವನ್ನು ಸಕ್ರಿಯಗೊಳಿಸಲು ಅನುಗುಣವಾದ ಬಿಟ್ ಅನ್ನು 0 ಗೆ ಹೊಂದಿಸಿ.ಮೇಲಿನ ಹಂತಗಳನ್ನು ಪೂರ್ಣಗೊಳಿಸಿದ ನಂತರ, ಎಂಪಿಯು -6050 ಸಾಮಾನ್ಯ ಕೆಲಸದ ಸ್ಥಿತಿಯನ್ನು ನಮೂದಿಸಬಹುದು.ವಿಶೇಷವಾಗಿ ಹೊಂದಿಸದ ಆ ರೆಜಿಸ್ಟರ್ಗಳು ಸಿಸ್ಟಮ್ನಿಂದ ಮೊದಲೇ ನಿಗದಿಪಡಿಸಿದ ಡೀಫಾಲ್ಟ್ ಮೌಲ್ಯಗಳನ್ನು ಅಳವಡಿಸಿಕೊಳ್ಳುತ್ತವೆ.
ಎಂಪಿಯು -6050 ಹೇಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ?
ಗೈರೋ ಸಂವೇದಕ
ಸಂವೇದಕವು ಒಳಗೆ ಗೈರೊವನ್ನು ಹೊಂದಿದೆ, ಇದು ಗೈರೊಸ್ಕೋಪಿಕ್ ಪರಿಣಾಮದಿಂದಾಗಿ ಯಾವಾಗಲೂ ಆರಂಭಿಕ ದಿಕ್ಕಿಗೆ ಸಮಾನಾಂತರವಾಗಿ ಉಳಿಯುತ್ತದೆ.ಆದ್ದರಿಂದ, ಗೈರೊದ ವಿಚಲನವನ್ನು ಆರಂಭಿಕ ದಿಕ್ಕಿನಿಂದ ಪತ್ತೆಹಚ್ಚುವ ಮೂಲಕ ನಾವು ತಿರುಗುವಿಕೆಯ ದಿಕ್ಕು ಮತ್ತು ಕೋನವನ್ನು ಲೆಕ್ಕ ಹಾಕಬಹುದು.
ವೇಗವರ್ಧಕ ಸಂವೇದಕ
ಅಕ್ಸೆಲೆರೊಮೀಟರ್ ಸಂವೇದಕವು ವೇಗವರ್ಧನೆಯನ್ನು ಅಳೆಯುವ ಸಾಧನವಾಗಿದ್ದು, ಇದು ಪೀಜೋಎಲೆಕ್ಟ್ರಿಕ್ ಪರಿಣಾಮದ ತತ್ವವನ್ನು ಆಧರಿಸಿ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ.ವೇಗವರ್ಧನೆಯ ಸಮಯದಲ್ಲಿ, ಸಂವೇದಕವು ಮಾಸ್ ಬ್ಲಾಕ್ಗೆ ಅನ್ವಯಿಸುವ ಜಡತ್ವ ಬಲವನ್ನು ಅಳೆಯುತ್ತದೆ ಮತ್ತು ನಂತರ ನ್ಯೂಟನ್ನ ಎರಡನೇ ನಿಯಮವನ್ನು ಬಳಸಿಕೊಂಡು ವೇಗವರ್ಧಕ ಮೌಲ್ಯವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುತ್ತದೆ.
ಡಿಜಿಟಲ್ ಮೋಷನ್ ಪ್ರೊಸೆಸರ್ (ಡಿಎಂಪಿ)
ಡಿಎಂಪಿ ಎಂಪಿಯು 6050 ಚಿಪ್ನಲ್ಲಿರುವ ಡೇಟಾ ಸಂಸ್ಕರಣಾ ಮಾಡ್ಯೂಲ್ ಆಗಿದ್ದು, ಇದು ಗೈರೊಸ್ಕೋಪ್ ಮತ್ತು ಅಕ್ಸೆಲೆರೊಮೀಟರ್ ಸಂವೇದಕಗಳಿಂದ ಡೇಟಾವನ್ನು ಸ್ವಾಧೀನಪಡಿಸಿಕೊಳ್ಳಲು ಮತ್ತು output ಟ್ಪುಟ್ ಕ್ವಾಟರ್ನಿಯನ್ಗಳನ್ನು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಲು ಅಂತರ್ನಿರ್ಮಿತ ಕಲ್ಮನ್ ಫಿಲ್ಟರಿಂಗ್ ಅಲ್ಗಾರಿದಮ್ ಅನ್ನು ಹೊಂದಿದೆ.ಈ ವೈಶಿಷ್ಟ್ಯವು ಬಾಹ್ಯ ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ನ ಕೆಲಸದ ಹೊರೆ ಬಹಳವಾಗಿ ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಬೇಸರದ ಫಿಲ್ಟರಿಂಗ್ ಮತ್ತು ಡೇಟಾ ಸಮ್ಮಿಳನ ಪ್ರಕ್ರಿಯೆಯನ್ನು ತಪ್ಪಿಸುತ್ತದೆ.
ಟಿಪ್ಪಣಿಗಳು:
ಕ್ವಾಟರ್ನಿಯನ್ಸ್: ಕ್ವಾಟರ್ನಿಯನ್ಸ್ ಸರಳ ಸೂಪರ್ ಕಂಪ್ಲೆಕ್ಸ್ ಸಂಖ್ಯೆಗಳು.ಸಂಕೀರ್ಣ ಸಂಖ್ಯೆಗಳು ನೈಜ ಸಂಖ್ಯೆಗಳಿಂದ ಕೂಡಿದೆ ಮತ್ತು ಕಾಲ್ಪನಿಕ ಘಟಕ I, ಅಲ್ಲಿ ನಾನು^2 = -1.
ಎಂಪಿಯು -6050 ಅನ್ನು ಎಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ?
- ಆಟಿಕೆಗಳು
- ಹ್ಯಾಂಡ್ಸೆಟ್ ಮತ್ತು ಪೋರ್ಟಬಲ್ ಗೇಮಿಂಗ್
- ಚಲನೆ ಆಧಾರಿತ ಆಟದ ನಿಯಂತ್ರಕಗಳು
- ಬ್ಲರ್ಫ್ರೀ ™ ತಂತ್ರಜ್ಞಾನ (ವೀಡಿಯೊ/ಸ್ಟಿಲ್ ಇಮೇಜ್ ಸ್ಥಿರೀಕರಣಕ್ಕಾಗಿ)
- ಏರ್ಸೈನ್ ™ ತಂತ್ರಜ್ಞಾನ (ಭದ್ರತೆ/ದೃ hentic ೀಕರಣಕ್ಕಾಗಿ)
- ತ್ವರಿತಗ್ರಹ ™ Ig ™ ಗೆಸ್ಚರ್ ಗುರುತಿಸುವಿಕೆ
- ಆರೋಗ್ಯ, ಫಿಟ್ನೆಸ್ ಮತ್ತು ಕ್ರೀಡೆಗಳಿಗೆ ಧರಿಸಬಹುದಾದ ಸಂವೇದಕಗಳು
- ಚಲನೆ-ಶಕ್ತಗೊಂಡ ಆಟ ಮತ್ತು ಅಪ್ಲಿಕೇಶನ್ ಚೌಕಟ್ಟು
- ಮೋಷನ್ ಕಾಮಂಡ್ ™ ತಂತ್ರಜ್ಞಾನ (ಗೆಸ್ಚರ್ ಶಾರ್ಟ್-ಕಟ್ಗಳಿಗಾಗಿ)
- ಸ್ಥಳ ಆಧಾರಿತ ಸೇವೆಗಳು, ಆಸಕ್ತಿಯ ಅಂಶಗಳು ಮತ್ತು ಸತ್ತ ಲೆಕ್ಕಾಚಾರ
- ಇಂಟರ್ನೆಟ್ ಸಂಪರ್ಕಿತ ಡಿಟಿವಿಗಳಿಗಾಗಿ 3 ಡಿ ರಿಮೋಟ್ ಕಂಟ್ರೋಲ್ಸ್ ಮತ್ತು ಟಾಪ್ ಬಾಕ್ಸ್ಗಳನ್ನು ಹೊಂದಿಸಿ, 3 ಡಿ ಇಲಿಗಳು
- ಟೌಚನಿವೇ ™ ತಂತ್ರಜ್ಞಾನ (“ಸ್ಪರ್ಶವಿಲ್ಲ” ಯುಐ ಅಪ್ಲಿಕೇಶನ್ ನಿಯಂತ್ರಣ/ಸಂಚರಣೆ)
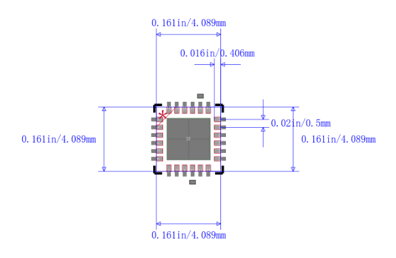
ಎಂಪಿಯು -6050 ರ ಪ್ಯಾಕೇಜ್
ಎಂಪಿಯು -6050 ರ ಶಬ್ದವನ್ನು ಹೇಗೆ ಕಡಿಮೆ ಮಾಡುವುದು?
ಎಂಪಿಯು -6050 ಶಬ್ದವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ನಾವು ಈ ಕೆಳಗಿನ ಮಾರ್ಗಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳಬಹುದು.
ಮಾಪನಾಂಕ ನಿರ್ಣಯಿಸಿದ ಸಂವೇದಕಗಳನ್ನು ಬಳಸಿ
ಎಂಪಿಯು -6050 ರ ವೇಗವರ್ಧಕ ಮತ್ತು ಗೈರೊಸ್ಕೋಪ್ ಅನ್ನು ಮಾಪನಾಂಕ ನಿರ್ಣಯಿಸುವುದರಿಂದ ಸಂವೇದಕಗಳ ಪಕ್ಷಪಾತ ಮತ್ತು ದೋಷವನ್ನು ಸ್ವತಃ ನಿವಾರಿಸಬಹುದು, ಇದರಿಂದಾಗಿ ಶಬ್ದದ ಪರಿಣಾಮವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.ಮಾಪನಾಂಕ ನಿರ್ಣಯ ಪ್ರಕ್ರಿಯೆಯು ಸಾಮಾನ್ಯವಾಗಿ ಎರಡು ಹಂತಗಳನ್ನು ಹೊಂದಿರುತ್ತದೆ: ಸ್ಥಿರ ಮಾಪನಾಂಕ ನಿರ್ಣಯ ಮತ್ತು ಚಲನೆಯ ಮಾಪನಾಂಕ ನಿರ್ಣಯ.
ಹಾರ್ಡ್ವೇರ್ ಫಿಲ್ಟರಿಂಗ್ ಪ್ರಕ್ರಿಯೆ
ಎಂಪಿಯು -6050 ರ ಪವರ್ ಲೈನ್ಗೆ ಫಿಲ್ಟರ್ ಕೆಪಾಸಿಟರ್ಗಳನ್ನು ಸೇರಿಸುವುದರಿಂದ ಸಂವೇದಕದ ಮೇಲೆ ವಿದ್ಯುತ್ ಸರಬರಾಜು ಶಬ್ದದ ಪರಿಣಾಮವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.ಏತನ್ಮಧ್ಯೆ, ಪಿಸಿಬಿ ವಿನ್ಯಾಸದ ಸಮಯದಲ್ಲಿ, ಹೆಚ್ಚಿನ ಆವರ್ತನ ಸಿಗ್ನಲ್ ರೇಖೆಗಳು ಮತ್ತು ಹೆಚ್ಚಿನ-ಶಕ್ತಿಯ ಘಟಕಗಳಂತಹ ಹಸ್ತಕ್ಷೇಪದ ಸಂಭಾವ್ಯ ಮೂಲಗಳಿಂದ ಎಂಪಿಯು -6050 ಅನ್ನು ದೂರವಿರಿಸಲು ನಾವು ಪ್ರಯತ್ನಿಸಬೇಕು.
ಸಾಫ್ಟ್ವೇರ್ ಫಿಲ್ಟರಿಂಗ್ ಪ್ರಕ್ರಿಯೆ
ಎಂಪಿಯು -6050 ನಿಂದ ಕಚ್ಚಾ ಡೇಟಾವನ್ನು ಸಂಗ್ರಹಿಸಿದ ನಂತರ, ಶಬ್ದ-ಪ್ರೇರಿತ ಹಸ್ತಕ್ಷೇಪವನ್ನು ತೆಗೆದುಹಾಕಲು ಆರಂಭಿಕ ಡೇಟಾವನ್ನು ಮೊದಲೇ ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಲು ನಾವು ಸಾಫ್ಟ್ವೇರ್ ಫಿಲ್ಟರಿಂಗ್ ಲಿಂಕ್ ಅನ್ನು ಸೇರಿಸಬಹುದು.ಸಾಮಾನ್ಯವಾಗಿ ಬಳಸುವ ಸಾಫ್ಟ್ವೇರ್ ಫಿಲ್ಟರಿಂಗ್ ವಿಧಾನಗಳಲ್ಲಿ ಸರಾಸರಿ ಫಿಲ್ಟರಿಂಗ್, ಸರಾಸರಿ ಫಿಲ್ಟರಿಂಗ್, ಕಲ್ಮನ್ ಫಿಲ್ಟರಿಂಗ್ ಮತ್ತು ಮುಂತಾದವು ಸೇರಿವೆ.
ಆಂತರಿಕ ಕಡಿಮೆ-ಪಾಸ್ ಫಿಲ್ಟರ್ ಬಳಸಿ
ಎಂಪಿಯು -6050 ಆಂತರಿಕ ಇಂಟಿಗ್ರೇಟೆಡ್ ಡಿಜಿಟಲ್ ಲೋ-ಪಾಸ್ ಫಿಲ್ಟರ್ ಅನ್ನು ಹೊಂದಿದೆ, ಇದನ್ನು ಅದರ ಕಟ್ಆಫ್ ಆವರ್ತನವನ್ನು ಹೊಂದಿಸುವ ಮೂಲಕ ಹೆಚ್ಚಿನ ಆವರ್ತನ ಶಬ್ದವನ್ನು ಕಡಿಮೆ ಮಾಡಲು ಬಳಸಬಹುದು.ನಿರ್ದಿಷ್ಟವಾಗಿ, ಎ/ಡಿ ಮಾದರಿಯಿಂದ ಉಂಟಾಗುವ ಹೆಚ್ಚಿನ ಆವರ್ತನ ಶಬ್ದವನ್ನು ತೆಗೆದುಹಾಕಲು ಎಂಪಿಯು -6050 ರ ಕಾನ್ಫಿಗರ್ ರಿಜಿಸ್ಟರ್ ಅನ್ನು ಮಾರ್ಪಡಿಸುವ ಮೂಲಕ ನಾವು ಡಿಜಿಟಲ್ ಫಿಲ್ಟರ್ನ ಕಟ್ಆಫ್ ಆವರ್ತನವನ್ನು ಹೊಂದಿಸಬಹುದು.
ಎಂಪಿಯು -6050 ಆಧಾರಿತ ಚಲನೆಯ ಪಥದ ಲೆಕ್ಕಾಚಾರ
ಎಂಪಿಯು -6050 ಆರು-ಅಕ್ಷದ ವೇಗವರ್ಧಕ ಮತ್ತು ಗೈರೊಸ್ಕೋಪ್ ಸಂವೇದಕವಾಗಿದ್ದು, ಇದನ್ನು ವಸ್ತುಗಳ ಚಲನೆ ಮತ್ತು ಮನೋಭಾವವನ್ನು ಅಳೆಯಲು ಬಳಸಬಹುದು.ಎಂಪಿಯು -6050 ಆಧಾರಿತ ಚಲನೆಯ ಪಥದ ಲೆಕ್ಕಾಚಾರವನ್ನು ಈ ಕೆಳಗಿನ ಹಂತಗಳಿಂದ ಅರಿತುಕೊಳ್ಳಬಹುದು:
ಸಂವೇದಕ ಡೇಟಾವನ್ನು ಓದುವುದು ಮೊದಲ ಹಂತವಾಗಿದೆ.ಸೂಕ್ತವಾದ ಚಾಲಕರು ಮತ್ತು ಗ್ರಂಥಾಲಯ ಕಾರ್ಯಗಳನ್ನು ಬಳಸಿಕೊಂಡು ನಾವು ಎಂಪಿಯು -6050 ಸಂವೇದಕಗಳಿಂದ ಅಕ್ಸೆಲೆರೊಮೀಟರ್ ಮತ್ತು ಗೈರೊಸ್ಕೋಪ್ ಡೇಟಾವನ್ನು ಓದಬೇಕಾಗಿದೆ.ಈ ಡೇಟಾವು ಸಾಮಾನ್ಯವಾಗಿ ಡಿಜಿಟಲ್ ಸ್ವರೂಪದಲ್ಲಿ output ಟ್ಪುಟ್ ಆಗಿರುತ್ತದೆ, ಆದ್ದರಿಂದ ಅವುಗಳನ್ನು ಭೌತಿಕ ಘಟಕಗಳಲ್ಲಿನ ನೈಜ ಅಳತೆಗಳಾಗಿ ಪರಿವರ್ತಿಸಲು ಕೆಲವು ಪರಿವರ್ತನೆ ಮತ್ತು ಮಾಪನಾಂಕ ನಿರ್ಣಯ ಕಾರ್ಯಗಳು ಬೇಕಾಗುತ್ತವೆ.
ವೇಗವರ್ಧನೆಯನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು ಎರಡನೆಯ ಹಂತವಾಗಿದೆ.ಮೊದಲಿಗೆ, ಪ್ರತಿ ಅಕ್ಷದಲ್ಲಿ ವಸ್ತುವಿನ ವೇಗವರ್ಧನೆಯನ್ನು ಪಡೆಯಲು ನಾವು ಅಕ್ಸೆಲೆರೊಮೀಟರ್ನಿಂದ ಡೇಟಾವನ್ನು ಪ್ರಕ್ರಿಯೆಗೊಳಿಸಬೇಕಾಗಿದೆ.ತರುವಾಯ, ಪ್ರತಿ ಅಕ್ಷದಲ್ಲಿ ವಸ್ತುವಿನ ವೇಗ ಮತ್ತು ಸ್ಥಳಾಂತರವನ್ನು ಲೆಕ್ಕಹಾಕಲು, ನಾವು ವೇಗವರ್ಧಕ ಡೇಟಾವನ್ನು ಸಂಯೋಜಿಸಬೇಕಾಗಿದೆ.ಸ್ಥಳಾಂತರದ ಲೆಕ್ಕಾಚಾರಗಳ ನಿಖರತೆಯನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಈ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಯೂಲರ್ನ ವಿಧಾನ ಅಥವಾ ಲುಂಜರ್-ಕುಟ್ಟಾ ವಿಧಾನದಂತಹ ಸಂಖ್ಯಾತ್ಮಕ ಏಕೀಕರಣ ತಂತ್ರಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ.
ಮೂರನೆಯ ಹಂತವೆಂದರೆ ಕೋನೀಯ ವೇಗವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು.ಗೈರೊಸ್ಕೋಪ್ ಡೇಟಾವನ್ನು ಬಳಸಿಕೊಂಡು, ಪ್ರತಿ ಅಕ್ಷದಲ್ಲಿನ ವಸ್ತುವಿನ ಕೋನೀಯ ವೇಗವನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು.ಮತ್ತೆ, ನಿಜವಾದ ಭೌತಿಕ ಘಟಕಗಳಲ್ಲಿ ಕೋನೀಯ ವೇಗವನ್ನು ಪಡೆಯಲು ಈ ಡೇಟಾವನ್ನು ಮಾಪನಾಂಕ ನಿರ್ಣಯಿಸಿ ಪರಿವರ್ತಿಸಬೇಕು.
ತಿರುಗುವಿಕೆಯನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು ನಾಲ್ಕನೇ ಹಂತ.ಕೋನೀಯ ವೇಗದ ಡೇಟಾವನ್ನು ಸಂಯೋಜಿಸುವ ಮೂಲಕ, ಪ್ರತಿ ಅಕ್ಷದಲ್ಲಿ ವಸ್ತುವಿನ ತಿರುಗುವಿಕೆಯ ಕೋನವನ್ನು ಲೆಕ್ಕಹಾಕಬಹುದು.ಕೋನವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಯೂಲರ್ ವಿಧಾನ ಅಥವಾ ದೀರ್ಘ-ಕುಟ್ಟಾ ವಿಧಾನದಂತಹ ಸಂಖ್ಯಾತ್ಮಕ ಏಕೀಕರಣ ತಂತ್ರಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಇದನ್ನು ಮಾಡಬಹುದು.
ಡೇಟಾವನ್ನು ವಿಲೀನಗೊಳಿಸುವುದು ಐದನೇ ಹಂತವಾಗಿದೆ.ವಸ್ತುವಿನ ಸಂಪೂರ್ಣ ವರ್ತನೆ ಮತ್ತು ಸ್ಥಾನದ ಮಾಹಿತಿಯನ್ನು ಪಡೆಯಲು ನಾವು ವೇಗವರ್ಧಕಗಳು ಮತ್ತು ಗೈರೊಸ್ಕೋಪ್ಗಳಿಂದ ಡೇಟಾವನ್ನು ಸಂಯೋಜಿಸುತ್ತೇವೆ.ಕ್ವಾಟರ್ನಿಯನ್ ಆಧಾರಿತ ವರ್ತನೆ ಪರಿಹಾರಕ ಅಥವಾ ಯೂಲರ್ ಆಂಗಲ್ ಪರಿಹಾರಕದಂತಹ ಕ್ರಮಾವಳಿಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಇದನ್ನು ಮಾಡಬಹುದು.
ಆರನೇ ಹಂತವು ಫಲಿತಾಂಶಗಳನ್ನು ದೃಶ್ಯೀಕರಿಸುವುದು.ನಾವು ಕಂಪ್ಯೂಟೆಡ್ ಆಬ್ಜೆಕ್ಟ್ ಚಲನೆಯ ಪಥವನ್ನು 3D ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿನ ಬಿಂದುಗಳ ಗುಂಪಾಗಿ ಪರಿವರ್ತಿಸುತ್ತೇವೆ ಮತ್ತು ವಸ್ತುವಿನ ಚಲನೆಯ ಪಥ ಮತ್ತು ವರ್ತನೆ ಬದಲಾವಣೆಗಳ ಬಗ್ಗೆ ಹೆಚ್ಚು ಅರ್ಥಗರ್ಭಿತ ತಿಳುವಳಿಕೆಗಾಗಿ ಸೂಕ್ತವಾದ ದೃಶ್ಯೀಕರಣ ಸಾಧನಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಅದನ್ನು ಪ್ರದರ್ಶಿಸುತ್ತೇವೆ.
ಪದೇ ಪದೇ ಕೇಳಲಾಗುವ ಪ್ರಶ್ನೆಗಳು [FAQ]
1. MPU6050 ಎಷ್ಟು ನಿಖರವಾಗಿದೆ?
ಸ್ವಾಧೀನಪಡಿಸಿಕೊಂಡ ಫಲಿತಾಂಶಗಳು 1 % ಕ್ಕಿಂತ ಕಡಿಮೆ ಮತ್ತು ವಿಶ್ವಾಸಾರ್ಹತೆಯ ಸಾಕಷ್ಟು ನಿಖರತೆಯನ್ನು ತೋರಿಸಿದವು, ಎಲಿವೇಟರ್ ಶಾಫ್ಟ್ನ ಸರಿಯಾದ ಆಯಾಮ ಮತ್ತು ಲಿಫ್ಟ್ ಉದ್ಯಮದ ಉನ್ನತ ಗುಣಮಟ್ಟವನ್ನು ಭರವಸೆ ನೀಡುತ್ತದೆ.
2. MPU6050 ನಿಂದ ಡೇಟಾವನ್ನು ಹೇಗೆ ಓದುವುದು?
ಆಂತರಿಕ ಎಂಪಿಯು 6050 ರೆಜಿಸ್ಟರ್ಗಳನ್ನು ಓದಲು, ಮಾಸ್ಟರ್ ಪ್ರಾರಂಭದ ಸ್ಥಿತಿಯನ್ನು ಕಳುಹಿಸುತ್ತಾನೆ, ನಂತರ ಐ 2 ಸಿ ಸ್ಲೇವ್ ವಿಳಾಸ ಮತ್ತು ಬರೆಯುವ ಬಿಟ್, ತದನಂತರ ಓದಲು ಹೋಗುವ ರಿಜಿಸ್ಟರ್ ವಿಳಾಸ.
3. MPU6050 ಅನ್ನು ಎಲ್ಲಿ ಬಳಸಲಾಗುತ್ತದೆ?
ಧರಿಸಬಹುದಾದ ಆರೋಗ್ಯ-ಟ್ರ್ಯಾಕಿಂಗ್, ಫಿಟ್ನೆಸ್-ಟ್ರ್ಯಾಕಿಂಗ್ ಸಾಧನಗಳಲ್ಲಿ.ಡ್ರೋನ್ಗಳು ಮತ್ತು ಕ್ವಾಡ್ಕಾಪ್ಟರ್ಗಳಲ್ಲಿ, ಸ್ಥಾನ ನಿಯಂತ್ರಣಕ್ಕಾಗಿ ಎಂಪಿಯು 6050 ಅನ್ನು ಬಳಸಲಾಗುತ್ತದೆ.ರೊಬೊಟಿಕ್ ತೋಳನ್ನು ನಿಯಂತ್ರಿಸಲು ಬಳಸಲಾಗುತ್ತದೆ.ಹ್ಯಾಂಡ್ ಗೆಸ್ಚರ್ ನಿಯಂತ್ರಣ ಸಾಧನಗಳು.
4. ಎಂಪಿಯು 6050 ಐಎಂಯು?
MPU6050 IMU ಸೆನ್ಸರ್ ಬ್ಲಾಕ್ ಹಾರ್ಡ್ವೇರ್ಗೆ ಸಂಪರ್ಕಗೊಂಡಿರುವ MPU-6050 ಸಂವೇದಕದಿಂದ ಡೇಟಾವನ್ನು ಓದುತ್ತದೆ.ಸಂವೇದಕದ ಅಕ್ಷಗಳ ಉದ್ದಕ್ಕೂ ವೇಗವರ್ಧನೆ, ಕೋನೀಯ ದರ ಮತ್ತು ತಾಪಮಾನವನ್ನು ಬ್ಲಾಕ್ p ಟ್ಪುಟ್ ಮಾಡುತ್ತದೆ.
5. MPU6050 ಪ್ರಕ್ರಿಯೆ ಏನು?
ಇದು ಎಂಪಿಯು 6050 ರ ಆನ್ಬೋರ್ಡ್ ಪ್ರೊಸೆಸರ್ ಆಗಿದ್ದು ಅದು ಅಕ್ಸೆಲೆರೊಮೀಟರ್ ಮತ್ತು ಗೈರೊಸ್ಕೋಪ್ನಿಂದ ಬರುವ ಡೇಟಾವನ್ನು ಸಂಯೋಜಿಸುತ್ತದೆ.ಎಂಪಿಯು 6050 ಅನ್ನು ಬಳಸಲು ಡಿಎಂಪಿ ಕೀಲಿಯಾಗಿದೆ ಮತ್ತು ನಂತರ ಅದನ್ನು ವಿವರವಾಗಿ ವಿವರಿಸಲಾಗಿದೆ.ಎಲ್ಲಾ ಮೈಕ್ರೊಪ್ರೊಸೆಸರ್ಗಳಂತೆ ಡಿಎಂಪಿಗೆ ಚಲಾಯಿಸಲು ಫರ್ಮ್ವೇರ್ ಅಗತ್ಯವಿದೆ.
ಕಾರ್ಯ ಪರೀಕ್ಷೆ.ಹೆಚ್ಚಿನ ವೆಚ್ಚ-ಪರಿಣಾಮಕಾರಿ ಉತ್ಪನ್ನಗಳು ಮತ್ತು ಉತ್ತಮ ಸೇವೆ ನಮ್ಮ ಶಾಶ್ವತ ಬದ್ಧತೆ.
ಬಿಸಿ ಲೇಖನ
- Cr2032 ಮತ್ತು Cr2016 ಪರಸ್ಪರ ಬದಲಾಯಿಸಬಹುದಾಗಿದೆ
- MOSFET: ವ್ಯಾಖ್ಯಾನ, ಕೆಲಸದ ತತ್ವ ಮತ್ತು ಆಯ್ಕೆ
- ರಿಲೇ ಸ್ಥಾಪನೆ ಮತ್ತು ಪರೀಕ್ಷೆ, ರಿಲೇ ವೈರಿಂಗ್ ರೇಖಾಚಿತ್ರಗಳ ವ್ಯಾಖ್ಯಾನ
- ಸಿಆರ್ 2016 ವರ್ಸಸ್ ಸಿಆರ್ 2032 ಏನು ವ್ಯತ್ಯಾಸ
- ಎನ್ಪಿಎನ್ ವರ್ಸಸ್ ಪಿಎನ್ಪಿ: ವ್ಯತ್ಯಾಸವೇನು?
- ಇಎಸ್ಪಿ 32 ವರ್ಸಸ್ ಎಸ್ಟಿಎಂ 32: ಯಾವ ಮೈಕ್ರೊಕಂಟ್ರೋಲರ್ ನಿಮಗೆ ಉತ್ತಮವಾಗಿದೆ?
- LM358 ಡ್ಯುಯಲ್ ಆಪರೇಶನಲ್ ಆಂಪ್ಲಿಫಯರ್ ಸಮಗ್ರ ಮಾರ್ಗದರ್ಶಿ: ಪಿನ್ outs ಟ್ಗಳು, ಸರ್ಕ್ಯೂಟ್ ರೇಖಾಚಿತ್ರಗಳು, ಸಮಾನಗಳು, ಉಪಯುಕ್ತ ಉದಾಹರಣೆಗಳು
- ಸಿಆರ್ 2032 ವರ್ಸಸ್ ಡಿಎಲ್ 2032 ವರ್ಸಸ್ ಸಿಆರ್ 2025 ಹೋಲಿಕೆ ಮಾರ್ಗದರ್ಶಿ
- ವ್ಯತ್ಯಾಸಗಳನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳುವುದು ESP32 ಮತ್ತು ESP32-S3 ತಾಂತ್ರಿಕ ಮತ್ತು ಕಾರ್ಯಕ್ಷಮತೆ ವಿಶ್ಲೇಷಣೆ
- ಆರ್ಸಿ ಸರಣಿ ಸರ್ಕ್ಯೂಟ್ನ ವಿವರವಾದ ವಿಶ್ಲೇಷಣೆ
 NRF24L01 ಸಂವಹನ ಚಿಪ್ನ ಸಾಮರ್ಥ್ಯಗಳು ಮತ್ತು ಅನ್ವಯಗಳನ್ನು ಅನ್ವೇಷಿಸಲಾಗುತ್ತಿದೆ
NRF24L01 ಸಂವಹನ ಚಿಪ್ನ ಸಾಮರ್ಥ್ಯಗಳು ಮತ್ತು ಅನ್ವಯಗಳನ್ನು ಅನ್ವೇಷಿಸಲಾಗುತ್ತಿದೆ
2024-04-25
 MMBT3904 NPN ಟ್ರಾನ್ಸಿಸ್ಟರ್: ಅದರ ವಿಶೇಷಣಗಳು, ಸಮಗ್ರ ಅಪ್ಲಿಕೇಶನ್ ಗೈಡ್, ಮತ್ತು MMBT3904 ವರ್ಸಸ್ MMBT5551
MMBT3904 NPN ಟ್ರಾನ್ಸಿಸ್ಟರ್: ಅದರ ವಿಶೇಷಣಗಳು, ಸಮಗ್ರ ಅಪ್ಲಿಕೇಶನ್ ಗೈಡ್, ಮತ್ತು MMBT3904 ವರ್ಸಸ್ MMBT5551
2024-04-25
ಬಿಸಿ ಭಾಗ ಸಂಖ್ಯೆ
 CGJ5L2X7R0J155K160AA
CGJ5L2X7R0J155K160AA C3216CH1H333K085AA
C3216CH1H333K085AA SMJ316BB7223KLHT
SMJ316BB7223KLHT GRM0225C1E7R8DDAEL
GRM0225C1E7R8DDAEL CL21F105ZAFNNNE
CL21F105ZAFNNNE GJM1555C1H8R5WB01D
GJM1555C1H8R5WB01D GRM1887U1H5R5DZ01D
GRM1887U1H5R5DZ01D F950J686MAAAQ2
F950J686MAAAQ2 EPM7064LI84-15
EPM7064LI84-15 MCP3906A-I/SS
MCP3906A-I/SS
- A40MX02-PL44
- X96010V14IZ
- VI-21T-EV
- 7MBP75UEA120
- TPS54550PWP
- ADS1675IPAG
- LMZ20502SILT
- 74LVQ244MTR
- LM258AMX
- T491D476K016AT4860
- MSP430F247TPM
- LTC4242CUHF#PBF
- SN65HVD3086EDGSR
- CD4052BCN
- CD4040BCMX
- BC313143A13-IRK-E4
- IDTQS3253Q
- ISL1535IVEZ
- LT1761ES5-3.3
- M3601C-A1A
- MB651645UPF-G-BND
- MC145193FR2
- NANDA9R4N4CZBA5E
- NJM2407R
- P74FCT827ATSO
- S-8232NDFT-T2
- IRKT250-12C
- DB8520BH
- RAZ-51860311
- CH7307C-DEF-TR
- L7508AAJ
- MT8550MBAG
- TC9327AF-639
- HYE18M512160BF-6
- ML64168-014GP
- TY90HH131635RA
- IS61DDPB22M36-400M3L
- K5W2G1GACB-DL60
- V24C24C100A